
Since the first day that I started working with FCD (Floating Car Data), I have this image (above) in my mind. I’m in a struggle with myself, “No they don’t swim in the sea, they don’t!”. So, what is this FCD, why do we accept some cars as floating? Everyone agrees that the main purpose of FCD is to obtain traffic engineering data such as travel time or speed on the road network via floating 😊 probe vehicles that are “moving” in traffic. However, we can say that the answer to the question “What is?” is still controversial.
Method versus data discussions is continuing. It is ok for me to accept Wikipedia’s definition, this is a method, not data. Thus it will no longer be absurd to say “Floating Car Data data”.
In the literature, FCD generally covers data obtained without the need for any additional roadside sensors, which is mostly provided by vehicles with “GPS” equipment. Although Wikipedia accepts traveling time with Bluetooth sensors as an FCD method, I find this contradictory as it requires the installation of the roadside Bluetooth Reader (see how Bluetooth sensors work). Therefore, I will continue with the FCD provided by probe vehicles with GPS equipment.
Types of FCD
So, how is the situation with the data types on the FCD side with GPS equipment in the literature? Here we can say that there are basically two types of FCD, raw data and processed data.
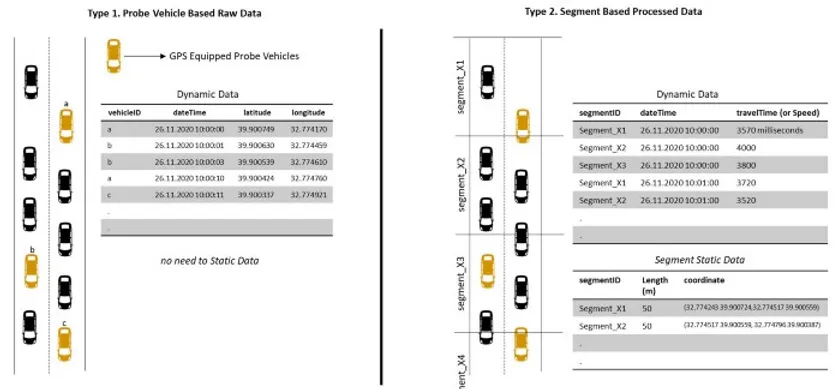
The literature is largely based on probe vehicle-based raw data, which is Type 1. This data is mostly provided directly by companies that sell GPS modules to vehicles. They record the position information of the vehicles in different second intervals and data such as speed and travel time can be produced with this information. Its biggest advantage is that it enables origin-destination studies as it provides vehicle-based data.
Type 2 data is provided by companies that receive data from vehicles equipped with GPS modules and process them. These companies convert the data received from each vehicle into travel time or speed data in minutes over the road segments they determine. In addition, it is necessary to get the static data of the segments
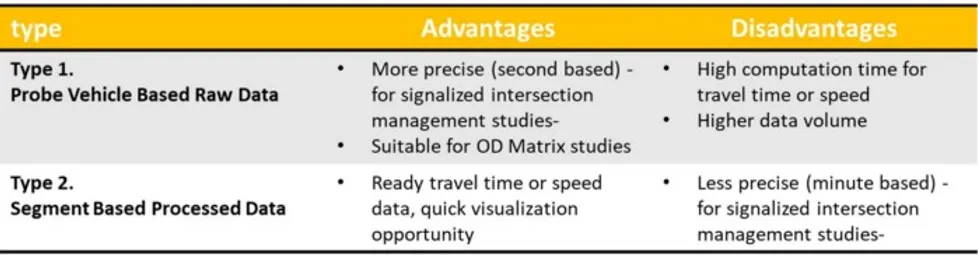
We can talk about the advantages and disadvantages of both data.
The data we use in the products we develop is segment-based processed data. In the ongoing articles, I will talk about which software we developed with this data, how we used it in intersection management, although it is not based on seconds.